Blog
All Blog Posts | Next Post | Previous Post

 New linear algebra operations and symbolic features in TMS Analytics & Physics library
New linear algebra operations and symbolic features in TMS Analytics & Physics library
Friday, July 13, 2018
TMS Analytics & Physics developing library supports operations with array and matrix variables and includes special package of linear algebra functions. New version 2.5 introduces many capabilities and improvements for linear algebra operations. First, new operators introduces specially for vector and matrix operations: cross product operator ‘×’, matrix inverse operator ‘`’, norm operator ‘||’. In previous version of Analytics library matrix multiplication with standard linear algebra rules were implemented using multiply operator ‘*’. In new version matrix-matrix and matrix-vector multiplication implemented using the cross product operator, and the multiply operator used for by-element multiplication. This leads to more compliant algebra rules: multiply operation is always commutative, as for numbers as for matrices and vectors, and the cross operation is not commutative. By the same reason, the inverse operation used now for calculating inverse of square matrices, as the division operation now is always by-element one (so, the division operation is the inverse of multiplication). The norm operator evaluates the L2 norm of vectors and matrices, and the absolute operator ‘||’ used for evaluating absolute values of vector and matrix components. Let us consider the difference between multiplication operator and cross operator with the simple example. Suppose there are the following two matrix variables:A [3x3] = B [3x3]= ( 0 0.1 0.2) ( 1 0 0) ( 1 1.1 1.2) ( 0 2 0) ( 2 2.2 2.3) ( 0 0 3)
A×B = [3x3] = A*B = [3x3]= ( 0 0.2 0.6) ( 0 0 0) ( 1 2.2 3.6) ( 0 2.2 0) ( 2 4.4 6.9) ( 0 0 6.9)
In addition to the operators, new functions for matrix arguments have been introduced in Linear Algebra package: trace of a square matrix tr(M), determinant of a square matrix det(M), adjoint of a square matrix adj(M), condition number of a square matrix cond(M), pseudo-inverse of a rectangular matrix pinv(M). The second improvement concerns symbolic capabilities for vectors and matrices. In previous versions, the only way of using arrays in formulae was introducing variables for them. The version 2.5 allows using explicit vector and matrix expressions in any symbolic formula. Example of simple vector expression with four components ‘[sin(x) cos(y) e^-x a*b]’. Matrix expressions are 2D rectangular arrays of expression elements. For example, ‘[[i j k] [sin(a) cos(a) -1]]’ is a 2x3 matrix expression.
Vector and matrix expressions can be used in formulae like vector and matrix variables. The difference is that the former are unnamed but their components can depend on other variables. Thus, we can calculate symbolic derivatives of the expressions. For example, the derivative of the above vector expression by ‘x’ is ‘[cos(x) 0 –(e^-x) 0]’.
For evaluating values of vector and matrix expressions, all their components must have the same type. The component types supported are: Boolean, Real and Complex.
As example of evaluating vector expressions let us consider the following problem: there is the array ‘A’ with four components and we need to calculate new array, selecting components from the ‘A’ by different four conditions. For solving this problem we can use vector form of ‘if’ function. The expression can be the following: ‘if{[a>1 b<3 a-x>0 b+x<2]}(A [-1 -2 -3 -4])’. Here the condition of the ‘if’ function defined by the vector expression with four Boolean expression components, depending on other variables: ‘a>1’, ‘b<3’, ‘a-x>0’ and ‘b+x<2’. The arguments of the functions are array variable ‘A’ and vector expression with four real components. Evaluating the expression with some given variable values, we get the following result:
x = 1.5
a = 1
b = -2
A = (1 0.5 0.25 0.125 )
if{[a>1 b<3 a-x>0 b+x<2]}(A [-1 -2 -3 -4]) = (-1 0.5 -3 0.125 )
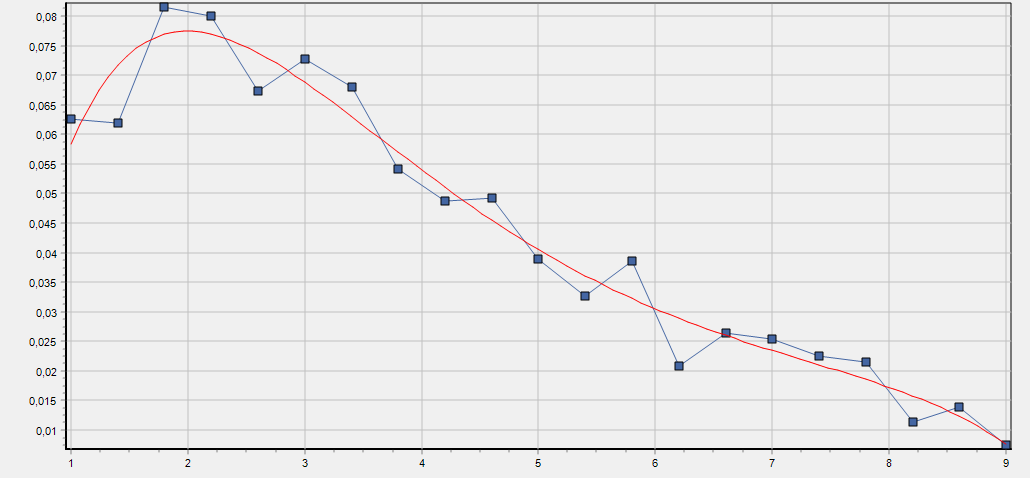
These new improvements of linear algebra capabilities allowed realizing vector basis for linear least squares approximation. Here is the source code of an approximation example using the vector basis:
var
approximator: TLinearApproximator;
basis: TLinearBasis;
func: string;
parameters: TArray<TVariable>;
exponents, cValues: TArray<TFloat>;
A: TVariable;
dim, order: integer;
begin
// Setting parameters for approximation.
dim:= 1; // One dimension.
// exponent values
exponents:= TArray<TFloat&ht;.Create(0.0, 0.5, -0.5, 0.7, -0.7);
order:= Length(exponents); // Basis order is the size of the array.
// Vector variable for exponent array.
A:= TRealArrayVariable.Create('A', exponents);
parameters:= TArray<TVariable>.Create(A); // Parameters for Vector basis.
func:= 'e^(A*X[0])'; // Vector function for basis - returns real vector.
// Create the basis with the specified function and parameters.
basis:= TLinearVectorBasis.Create('X', 'C', order, dim, parameters, func);
approximator:= TLinearLeastSquares.Create; // Linear approximator.
// Calculate the optimal basis coefficients.
cValues:= approximator.Approximate(basis, vData, fData);
// Using the approximation (basis with optimal coefficients)...
end;
F(X, C, A) = C•e^(A*X[0])
F(X) = [0.015894261869996 -0.000559709975637631 0.560703382127893
6.67799570997929E-5 -0.60704298180144]•e^([0 0.5 -0.5 0.7 -0.7]*X[0])
Advantages of using vector basis are:
- Simple basis function expression (in vector form).
- Easily create high-order basis (using big array parameter).
- Use arbitrary coefficients for the basis (fractional exponents, powers and so on).
- Change the basis without changing the function (use other values of the parameter array ‘A’).
var
translator: TTranslator;
F, Dxy: string;
begin
translator:= TTranslator.Create;
F:= '(y-A*ln(y))/x+B*(v(x+y))^(2/Pi)';
Dxy:= translator.Derivative(F, TArray<string>.Create('x','y'));
// using mixed derivative Dxy...
end;F(x,y) = (y-A*ln(y))/x+B*(v(x+y))^(2/Pi) dF/dxdy = (-1+A/y)/x^2+B*(1/p-1)*(x+y)^(1/p-2)/p
var F: string; Names: TArray<string>; begin F:= 'A[i]*sin(2*Pi*x)+A[j]*cos(2*Pi*y)+B[i]*e^((1+I)*x)+B[j]*e^((1-2I)*y)'; Names:= TTranslator.VariableNames(F); // using the Names array... end;
F = A[i]*sin(2*Pi*x)+A[j]*cos(2*Pi*y)+B[i]*e^((1+I)*x)+B[j]*e^((1-2I)*y) Variable names: A, i, x, j, y, B
The version 2.5 is already available here. Source code of the example application can be downloaded from here. Other examples of using vector/matrix operations, expressions and vector basis with graphics visualization included in demo projects of the version 2.5.
Bruno Fierens

This blog post has not received any comments yet.
All Blog Posts | Next Post | Previous Post